以結合粒子濾波器與平均向量演算法應用於三維人體動作參數追蹤
林士堯
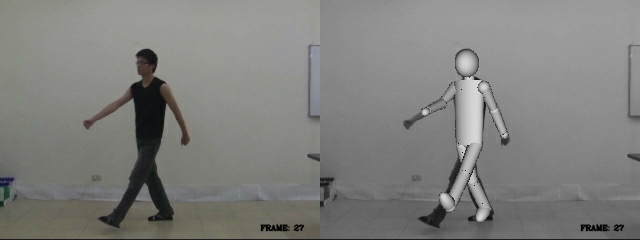
This study proposes a novel model-based algorithm, dynamic kernel based progressive particle filter, for 3D unconstraint human body tracking. The articulated full body motion tracking is the large number of degrees of freedom to be estimated. The aim of this study is to reduce the computational cost and improve the accuracy.
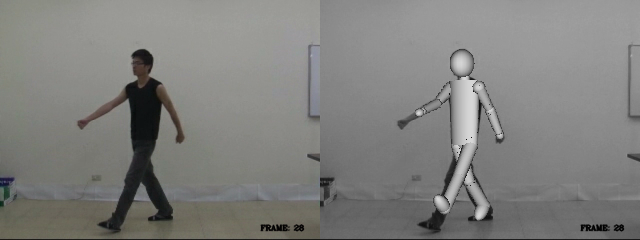
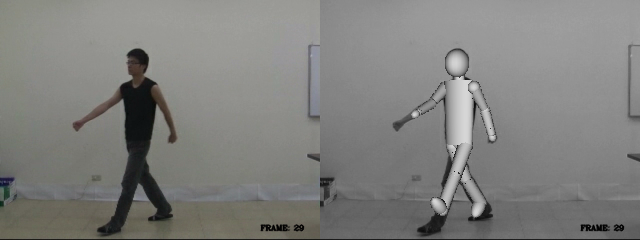
The progressive particle filter consists of three principal approaches: the multiple predictions technique of particle filter, the iterative mode seeking algorithm of mean shift and hierarchical searching approach. The hierarchical searching approach decomposes the high dimensional space into three subspaces, global motion layer, local inside motion layer and local outside motion layer, for decreasing the searching range. Natural human motion is usually non-linear and non-Gaussian, the system applies the random sampling technique of particle filter to predict the unconstraint motion of human body. The mean shift trackers are embedded into each particle to improve the accuracy by iterative mode seeking. Moreover, the study proposes a dynamic kernel model, which can automatically adjust the kernel bandwidth of mean shift trackers according to the probability of each state by improving the searching effectively. This study combines the progressive particle filter and dynamic kernel model for reducing the computational cost and improving the accuracy simultaneously.
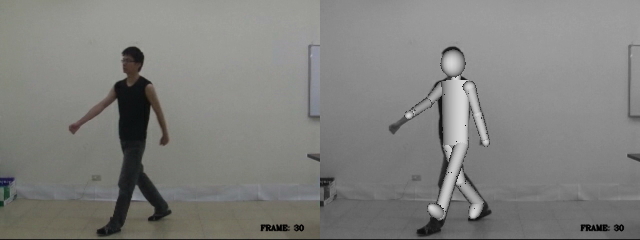
人體動作追蹤在電腦視覺這塊領域已經發展有一段時間了,至近幾年內仍是一個非常熱門的研究題目,它包含了偵測、追蹤以及辨識人體的行為動作參數,應用的範圍相當廣泛,包含了醫學分析、虛擬實境、生物統計學、視訊監控以及遊戲等等。但是這方面的研究往往受限於實驗的環境以及目前的追蹤技術,使其一直無法有很大的突破,傳統的作法是在人體上裝置大量的感應器(Motion Capturing Sensor),透過感應器回傳的3D座標,可以重建出人體的動作參數,但是由於器材過於昂貴且裝置大量的感應器在身上也相當不符合現實的實用性,所以我們試著開發一套系統,以三維人體模型作動作估測的比對方式(model-based),早期大部分研究中所使用的方法是利用多台camera由各個不同的角度拍攝來重建出人體的動作,但是考量到其實用性以及方便性,因此我們僅採用單一視角所拍攝的一般影片,使用者不需要穿著特殊的服飾或是帶上大量的感應器。在本論文提出了一個漸進式粒子濾波器有效的來降低了計算量以及提高了人體動作參數追蹤的準確度。漸進式粒子濾波器為結合階層式收尋法、粒子濾波器的隨機預測技術以及平均向量演算法遞迴收尋的機制。由於一般人體動作為非線性以及非規則化,粒子濾波器透過隨機預測的技術來估測人體多變的行為。由於人體動作相當的維度非常高,透過階層式收尋法有效則可有效的分解原本需要收尋的大維度空間,本系統將人體分成三個主要的階層,再分別使用各階層分群的粒子濾波器去擷取裡面的參數,由於各階層所需收尋的範圍變小了,所以此技術成功的提升了收尋的速度以及降低了計算量,另外我們將粒子濾波器裡的各粒子內嵌入一個平均向量追蹤器,平均向量追蹤器會慢慢的移動各粒子使其往附近高機率的位置移動,在一定次數的遞迴收尋後,各粒子會收斂至各自局部最大機率的位置。如此一來透過平均向量追蹤器我們有效的提升了各粒子的準確度。但是由於平均向量追蹤器的收斂次數在某些情況下仍然很高,因此在本系統中又更近一步的提出了一個動態核心模型,我們根據各平均向量追蹤器在每次遞迴所估算出來的機率,動態的改變其核心的收尋範圍以降低遞迴收尋的次數。經由我們的實驗更加證明了此結合技術不僅僅提高了追蹤的準確度並且有效的降低了收尋的速度以及計算量。